The SEDRIS Data Representation Model
APPENDIX A - Classes
Level Of Detail Related Geometry
|
|---|
Class Name: Level Of Detail Related Geometry
Subclasses
This DRM class is concrete and has no subclasses.
Definition
An instance of this DRM class is an aggregation of
<Geometry Hierarchy> objects in
which each component <Geometry Hierarchy> is
an alternate representation of the same entity at a different
level of detail. Each component <
Geometry Hierarchy> is a collection of <Geometry>
objects with a different, possibly overlapping,
<Base Level Of Detail Data>
value, representing alternatives that should be used at different
viewing ranges, map scales, spatial resolution, and so on.
Primary Page in DRM Diagram:
Secondary Pages in DRM Diagram:
This class appears on only one page of the DRM class diagram.
Example
- Consider a <Model> of a house, organized based on
viewing ranges. If the viewer is farther away than 1000 metres, the house
is not visible. From 500 metres to 1000 metres, the roof and walls are
visible but not in great detail. From 0 metres to 500 metres, the windows
and door become visible. Consequently, the <Model> is
visible at 2 distance-related levels of detail: 0-500 metres, and 500-100
metres.
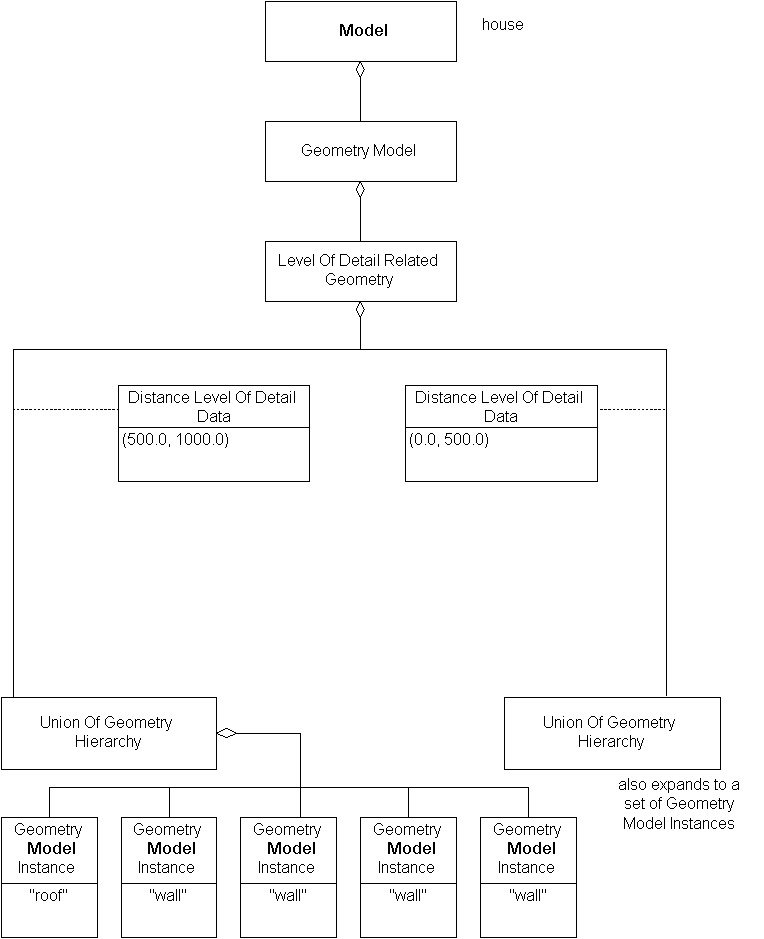
For the more detailed 0.0 - 500.0 metres, different "wall"
<Models>
are instanced for the walls containing the windows and doors; otherwise,
the structure of the two levels, for this example, is similar.
- Three <Models> of a given building are created,
each with different <Polygon> counts. The most
accurate representation is useful
up to a viewing distance of 1 kilometre, the second from 1 kilometre
to 2 kilometres, and the third for 2 kilometres to 5 kilometres.
To indicate this, a 4th <Model> can be created as
follows:
<Model>
<>
|
<Geometry Model>
<>
|
<Level Of Detail Related Geometry>
<>
---------------------------------------------------
| | |
|--<Distance LOD Data> |--<Distance LOD Data> |--<Distance LOD Data>
| 0.0 - 1.0 | 1.0 - 2.0 | 2.0 - 5.0
| | |
<GMI> <GMI> <GMI>
FAQs
No FAQs supplied.
Constraints
Associated by (one-way)(inherited)
Associated with (two-way)(inherited)
Composed of (two-way)(inherited)
Composed of (two-way)
Composed of (two-way metadata)(inherited)
Component of (two-way)(inherited)
Notes
Associated with Notes
An association between a <Geometry Hierarchy> instance and a
<Feature> instance indicates that the <Geometry Hierarchy>
and the <Feature> are alternate representations of the same
environmental object.
An association between two <Geometry Hierarchy> instances
indicates that they are alternate representations of the same
environmental object.
An association from a <Hierarchy Summary Item> instance to a
<Geometry Hierarchy> indicates that the <Hierarchy Summary Item>
summarizes that <Geometry Hierarchy>.
An association from a <Reference Surface> instance to a
<Geometry Hierarchy> indicates that the <Geometry Hierarchy>
organizes the geometric objects that specify the resolution
surface of the <Reference Surface>.
Composed of Notes
In the case where multiple <Collision Volume> components are
specified for a given <Aggregate Geometry>, the union of the
volumes thus specified is used in collision detection.
Fields Notes
If this value is SE_TRUE, each 'descendant' of this aggregation -
that is, each <Geometry> object that exists in the component tree
rooted at the given <Aggregate Geometry> - shall be unique, in the
sense that it shall appear in only one 'branch' of this aggregation.
If unique_descendants is SE_FALSE, at least one <Geometry> object
appears in more than one 'branch' of the aggregation.
If this value is SE_TRUE, each 'branch' of this aggregation
strictly complies with the organizing principle for its
particular subclass. If this value is SE_FALSE, at least
one 'branch' does not strictly comply with the given
organizing principle. See the organizing principle constraint
for each specific subclass for details.
Prev: Level Of Detail Related Features.
Next: Library.
Up:Index.
|
Last updated: October 1, 2002
|
Copyright © 2002 SEDRIS™
|
|