
|
The SEDRIS Data Representation Model
APPENDIX A - Classes Quad Tree Related Geometry |
|---|
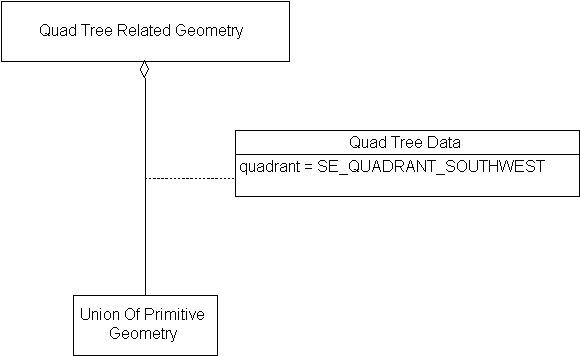
An instance of this DRM class specifies an aggregation of <Geometry Hierarchy> objects in which each component <Geometry Hierarchy> represents a branch of a Quad Tree. The quadrant represented by a branch is specified by the <Quad Tree Data> associated with that branch. The bounding region that the <Geometry Hierarchy> components occupy is defined by the <Spatial Domain> of the <Quad Tree Related Geometry>.
A <Quad Tree Related Geometry> is used when an object in the hierarchy contains spatial components that occupy a certain quadrant. These quadrants might not contain <Primitive Geometry> objects, which is why instances of this class can have less than four components.
<Quad Tree Related Geometry> automatically has a <Spatial Domain> component, component, because it is a <Geometry Hierarchy>. Unlike <Geometry Hierarchies> in general, however, <Quad Tree Related Geometry> has a constraint stating that the <Spatial Domain> component is mandatory.
| SE_Boolean | unique_descendants; | (notes) |
|---|---|---|
| SE_Boolean | strict_organizing_principle; | (notes) |
An association between a <Geometry Hierarchy> instance and a <Feature> instance indicates that the <Geometry Hierarchy> and the <Feature> are alternate representations of the same environmental object.
An association between two <Geometry Hierarchy> instances indicates that they are alternate representations of the same environmental object.
An association from a <Hierarchy Summary Item> instance to a <Geometry Hierarchy> indicates that the <Hierarchy Summary Item> summarizes that <Geometry Hierarchy>.
An association from a <Reference Surface> instance to a <Geometry Hierarchy> indicates that the <Geometry Hierarchy> organizes the geometric objects that specify the resolution surface of the <Reference Surface>.
In the case where multiple <Collision Volume> components are specified for a given <Aggregate Geometry>, the union of the volumes thus specified is used in collision detection.
If this value is SE_TRUE, each 'descendant' of this aggregation - that is, each <Geometry> object that exists in the component tree rooted at the given <Aggregate Geometry> - shall be unique, in the sense that it shall appear in only one 'branch' of this aggregation. If unique_descendants is SE_FALSE, at least one <Geometry> object appears in more than one 'branch' of the aggregation.
If this value is SE_TRUE, each 'branch' of this aggregation strictly complies with the organizing principle for its particular subclass. If this value is SE_FALSE, at least one 'branch' does not strictly comply with the given organizing principle. See the organizing principle constraint for each specific subclass for details.
|